Jestem bardzo mile zaskoczony popularnością mojej poprzedniej części która miała ponad 1,5 tysiąca wyświetleń
https://www.salon24.pl/u/przestrz/1192364,mechanika-obrotu-punktu-pochodna-pedu
Patrząc na to że były tam jedynie same rachunki i to w dodatku takie które zapewne dla większości czytelników salonu24 wyglądają jak pismo Chińskie, to tak dużo wyświetleń zrobiło na mnie bardzo pozytywne wrażenie i jest nadzieja że niektórzy z czytelników zainteresowali się więcej moimi wynikami.
Poprzednio pokazałem poprawność nowej pochodnej wektora momentu pędu i wykazałem że w nowych wzorach nie ma nic sprzecznego z obecną wiedzą o Fizyce. Ale od razu nasuwają się pytania: co z tego wynika? Do czego to ma służyć? I jak stosować te wzory do rzeczywistych przykładów?
Dlatego w tym rozdziale pokazałem jak stosować te wzory na konkretnych przykładach i wyciągnąłem z tych wzorów wnioski które nie były wcześniej widoczne. Pozwala to spojrzeć na ruch obrotowy z nowej perspektywy.
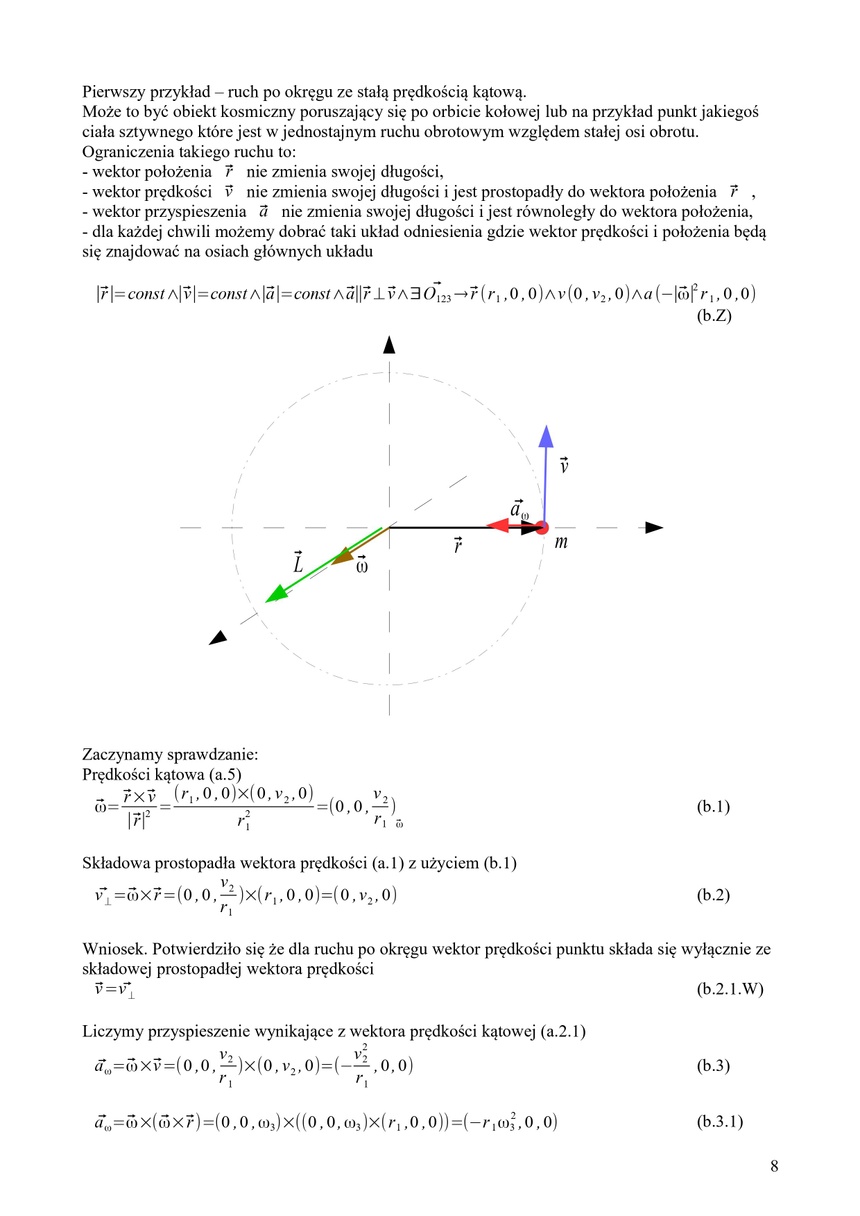
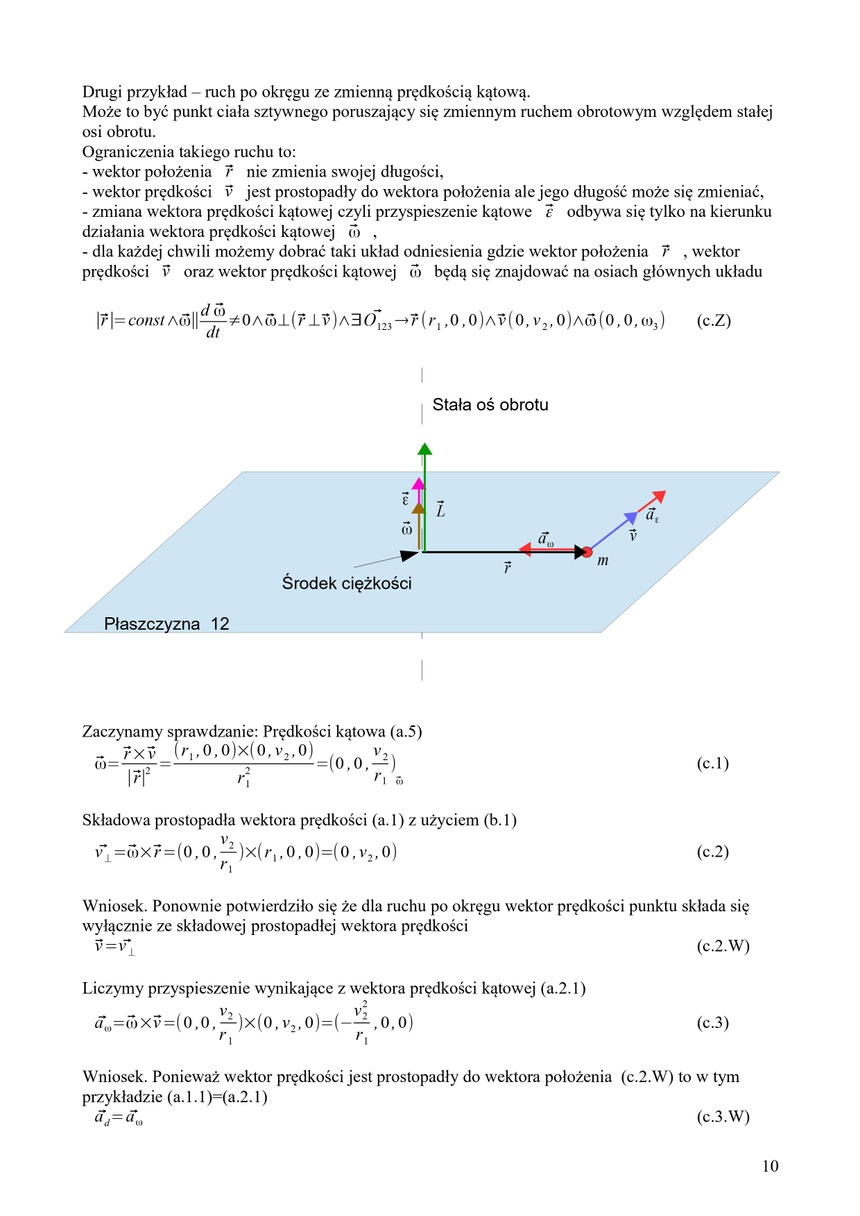
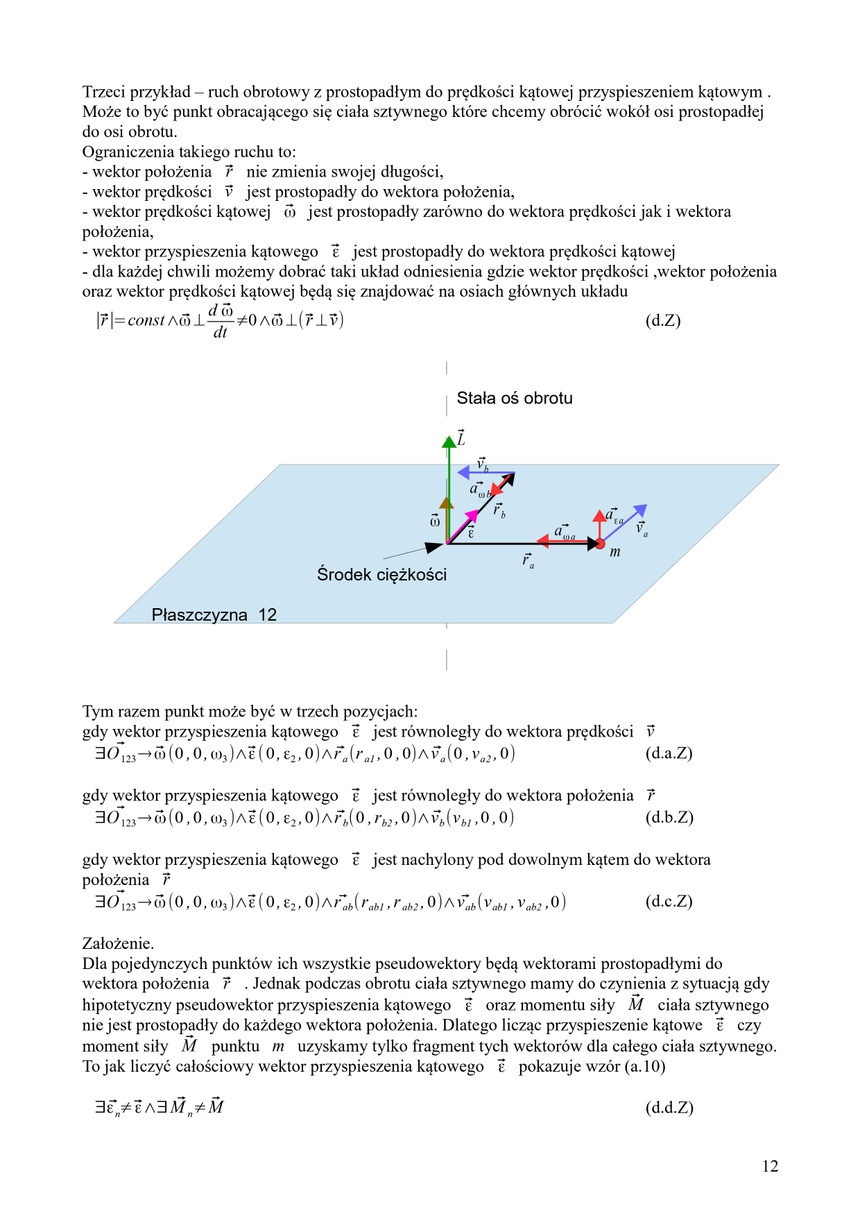
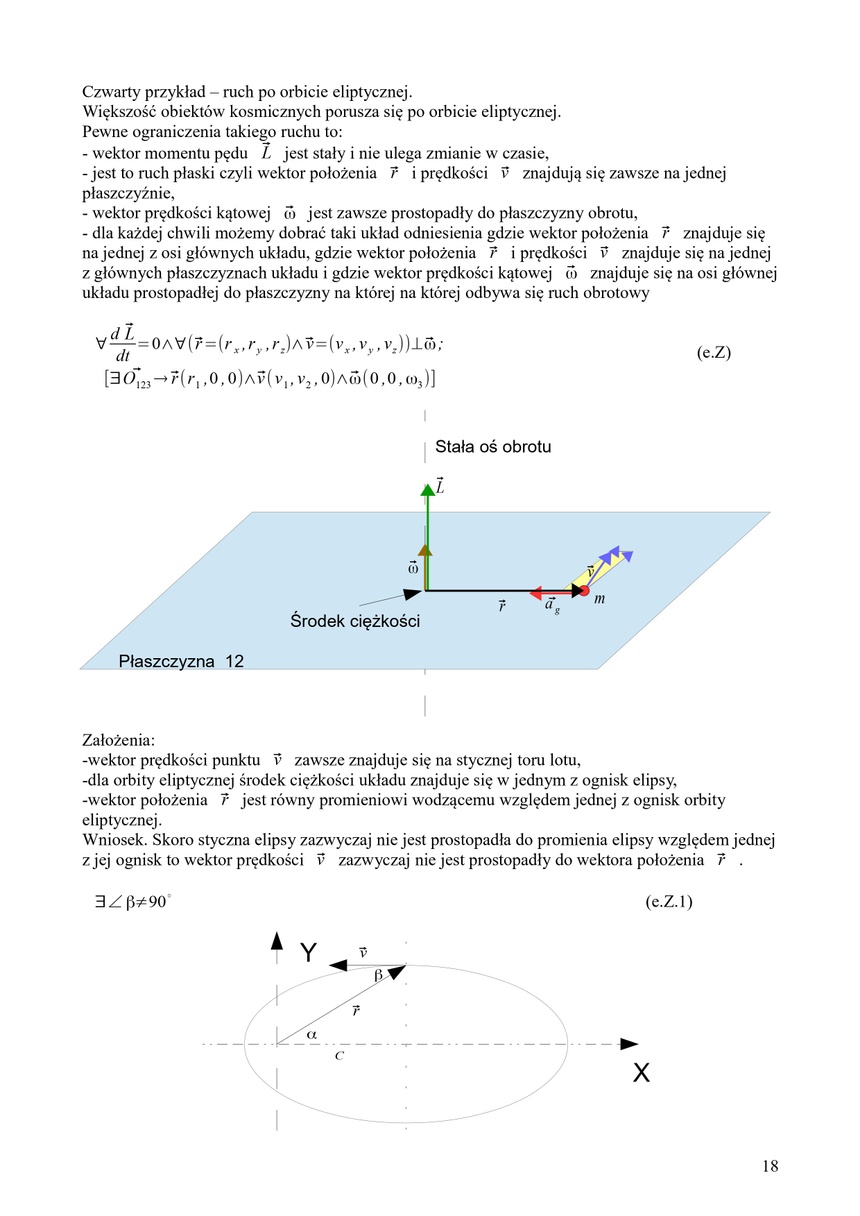
Poniżej opisany jest ruch po okręgu ze stałą prędkością, ruch po okręgu ze zmienną prędkością, ruch obrotowy z prostopadłym momentem siły do wektora krętu oraz ruch po orbicie eliptycznej.
Pozostaje jeszcze ruch obrotowy ciała sztywnego z różnymi głównymi momentami bezwładności. Niestety nie da się tego w pełni wytłumaczyć jedynie na bazie wzorów jakie stosowałem dla innych przykładów ponieważ niezbędne jest do tego jeszcze rozpisanie i wyjaśnienie czym jest tensor momentu bezwładności i czym są równania Eulera, a to zajmie zapewne dodatkowe kilkanaście albo i kilkadziesiąt stron. Dlatego też pełen obrót punktu ciała sztywnego opisze w następnym rozdziale wraz z wyjaśnieniami wszystkich mechanizmów jakie tam można zaobserwować.
Moi oponenci którzy twierdza że się mylę mają teraz możliwość wskazania w którym z poniższych wzorach są błędy. Wystarczy znaleźć jedno błędne równanie i wykazać że ma one istotny wpływ na końcowe wyniki.
Nie przedłużam już i miłego czytania.














Inne tematy w dziale Technologie