
Naprowadzanie samolotu TU154M podczas podejścia do lądowania może się odbywać w dwóch trybach:
- automatycznym, kontrolowanym przez system Kurs MP70;
- kontrolowanym przez pilota.
Ten drugi tryb jest wykorzystywany, gdy nie da się skorzystać z żadnego naprowadzania realizowanego przez urządzenia składowe systemu Kurs MP70 (np. ILS, RSBN, VOR) oraz wtedy, gdy samolot zejdzie do wysokości poniżej stosowalności naprowadzania automatycznego (60 m przy ILS kat 1, 30 m. przy ILS kat 2).
W trybie podejścia kontrolowanego przez pilota nie ma możliwości bezpośredniego ustawienia prędkości schodzenia lub (w połączeniu z kontrolą IAS) nachylenia ścieżki schodzenia. Jedyny parametr jaki daje się ustawić, to pochylenie samolotu. Może się to odbywać na dwa sposoby:
- przez manewrowanie kółkiem СПУСК-ПОДЪЕМ na pulpicie ПУ-46 systemu ABSU.
- przez poruszanie kolumny wolantu.
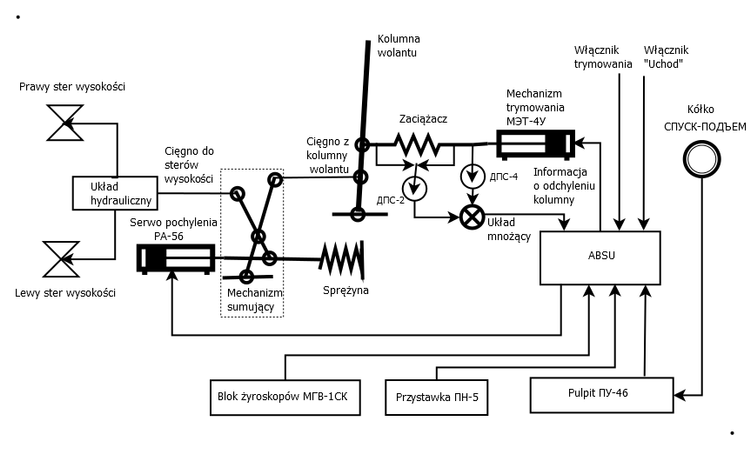
Rysunek 1. Uproszczony schemat sterowania pochyleniem samolotu
Zaangażowane przy tym składniki systemu sterowania pochyleniem samolotu przedstawiono na rysunku 1. Najważniejsze elementy tego systemu to:
- kolumna wolantu, sprzężona mechanicznie z mechanizmem trymowania i mechanizmem sumującym;
- ABSU wraz z blokiem współpracujących żyroskopów, oraz pulpitami i przystawkami;
- mechanizm trymowania kolumny МЭТ-4У (polskie oznaczenie MET-4U) sterowany z ABSU;
- serwomechanizm pochylenia РА-56 (polskie oznaczenie RA-56) sterowany z ABSU;
- mechanizm sumowania wymuszeń z kolumny wolantu i serwomechanizmu РА-56;
- układy hydrauliczne sterów wysokości i stery;
- czujniki wychylenia kolumny i serwomechanizmów, sterów oraz kątów pochylenia i natarcia.
Przycisk „Uchod” i ręczny włącznik trymowania są zlokalizowane na wolancie. „Uchod” włącza w ABSU układy sterowania odejściem na drugi krąg. Ręczny włącznik trymowania powoduje uruchomienie awaryjnego sterowania serwomechanizmu МЭТ-4У. W tym trybie serwomechanizm porusza się wielokrotnie szybciej i z siłą do razy 5 większą niż normalnie (150 kG zamiast 30 kG).
Czujnik ДПС-2 (polskie oznaczenie DPS-2) mierzy stopnień ściśnięcia lub rozciągnięcia zaciążacza, co jest równoznaczne z pomiarem odchylenia kolumny wolantu od pozycji wynikającej z ustawienia mechanizmu МЭТ-4У, czyli pozycji „wytrymowanej”. Czujnik ДПС-4 (polskie oznaczenie DPS-4) mierzy bezwzględny stopień wychylenia mechanizmu МЭТ-4У. Okazuje się, że nawet przy włączonym sterowaniu w kanale podłużnym przez ABSU, przy ustawianiu serwomechanizmu nastawy sterów РА-56 uwzględniany jest stopień wychylenia kolumny od pozycji wytrymowanej. Do wyliczeń stopnia przemieszczenia serwomechanizmu РА-56 brany iloczyn pomiarów z ДПС-2 i ДПС-4, tak jak to przedstawiono na rysunku 1. Ma to istotne znaczenie przy analizowaniu zachowania systemu sterowania pochyleniem. Schemat układu mnożącego pokazano na rysunku 2.
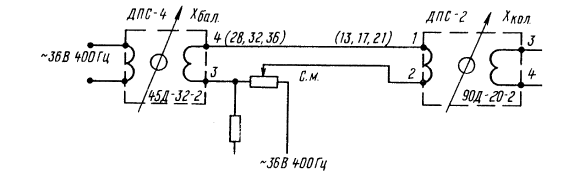
Rysunek 2. Schemat układu mnożącego
Analizując wykresy zawarte w raportach MAK i KBWLLP należy zwrócić uwagę na to, że jeśli serwomechanizm РА-56, МЭТ-4У i kolumna wolantu działają w zgodnym kierunku, jeśli chodzi o ustawienie sterów wysokości, to znaczy, że pilot poruszał kółko СПУСК-ПОДЪЕМ, a kolumnę wolantu przemieszczał mechanizm trymowania МЭТ-4У. Jeżeli natomiast pilot zaczyna poruszać kolumnę wolantu tak, że uzyskuje odchylenie od pozycji wytrymowanej, to stery wysokości zostają odchylone w stopniu wynikającym z mechanicznego złożenia przemieszczenia kolumny oraz wychylenia serwomechanizmu РА-56, kontrolowanego przez ABSU. Złożenie to wykonuje przedstawiony schematyczne na rysunku 1 mechanizm sumujący.
Ostateczny efekt polegający na zmianie pochylenia samolotu jest mierzony przez systemy żyrokopowe samolotu i porównywany z wychyleniem kolumny wolantu. Jeśli zmiana pochylenia w wyniku sumowania ruchu cięgna mechanicznego i sprzężenia przez ABSU okaże się za duża, przemieszczenie pozycji РА-56 podlega korekcie – jest wycofywane wstecz. W kilka sekund po ustabilizowaniu stanu, wykonywana jest natomiast podmiana:
- serwomechanizm РА-56 jest wycofywany do pozycji neutralnej;
- serwomechanizm МЭТ-4У zaczyna przemieszczać kolumnę wolantu tak, by sumaryczne wymuszenie dla sterów wysokości pozostało bez zmian. Jeśli pilot podda się temu ruchowi kolumny, wychylenie sterów się nie zmieni, jeśli ten ruch zablokuje, pochylenie zacznie wzrastać coraz bardziej.
Podczas podchodzenia do lądowania w Smoleńsku pojawiły się wszystkie omawiane tu efekty. Przedstawiają to: rysunek 3 i rysunek 4. Widać tam następujące charakterystyczne momenty:
Do godziny 08:40:43 Pochylenie samolotu ma wartość ujemną – samolot schodzi z „dziobem skierowanym w dół”, ale kąt natarcia ma wartość dodatnią, około 5 stopni.
08:40:43 - 08:40:48 Synchroniczne zmiany ustawienia РА-56(RA-56), МЭТ-4У(MET-4U), kolumny wolantu, sterów, pochylenia; taki synchronizm jest możliwy do osiągnięcia tylko i wyłącznie przez manewrowanie kółkiem СПУСК-ПОДЪЕМ.
08:40:48 - 08:40:51 Stabilne utrzymanie wartości wszystkich parametrów, z czego wynika brak zmian pochylenia – pochylenie nadal ma wartości lekko ujemne, czyli samolot jest skierowany „dziobem w dół”.
08:40:51.3 - 08:40:52 Po pojawieniu się sygnalizacji „wysokość decyzji” z RW, widać nieznaczny ruch kolumny wolantu, przy stabilnej pozycji МЭТ-4У, w rezultacie pojawia się ruch РА-56 i sumaryczne wychylenie sterów wysokości wynikające ze złożenia obu ruchów; konsekwencją jest rozpoczęcie wyraźniej zmiany pochylenia samolotu.
08:40:52 - 08:40:53.5 ABSU po otrzymaniu danych o skali zmiany pochylenia z bloku żyroskopów wycofuje ustawienie РА-56, to powoduje przestawienie sterów wysokości, zmiana kąta pochylenia jednak nadal postępuje na skutek bezwładności samolotu.
08:40:53.5 - 08:40:54.5 ABSU przystępuje do podmiany ustawienia РА-56 i МЭТ-4У: wycofuje РА-56
do pozycji neutralnej i stara się przemieścić kolumnę wolantu poprzez zmianę ustawienia МЭТ-4У, tak by wynikowe ustawienie sterów się nie zmieniło; można uznać, że operacja była skuteczna, bo mimo nieznacznej zmiany wychylenia sterów pochylenie samolotu się ustabilizowało.
08:40:54.5 - 08:40:55.5 Pilot zdecydowanym ruchem wychyla kolumnę wolantu, czego skutkiem jest odłączenie kontroli sterów wysokości przez ABSU i przejście do sterowania ręcznego.
08:40:55.5 - 08:40:56 Pilot osłabia siłę trzymania wolantu – prawdopodobnie przełożył jedną ręką na manetki gazu, w rezultacie kolumna wolantu odchyla się zgodnie z siłą nacisku zaciążacza; następuje zmiana ustawienia РА–56 i sterów wysokości, bezwładność decyduje jednak o tym, że to chwilowe wahnięcie nie zmienia pochylenia samolotu.
08:40:56 - 08:40:57 Pilot przyciąga kolumnę wolantu w maksymalnym możliwym stopniu - jak widać nie włącza przy tym wsparcia przez podsystem trymowania kolumny wolantu; zgodnie z tym zmienia się ustawienie РА–56 i sterów wysokości, w konsekwencji pochylenie zaczyna się gwałtownie zmieniać zgodnie z tym ruchem sterów; samolot jest już jednak na wysokościach rzędu kilku metrów nad ziemią.
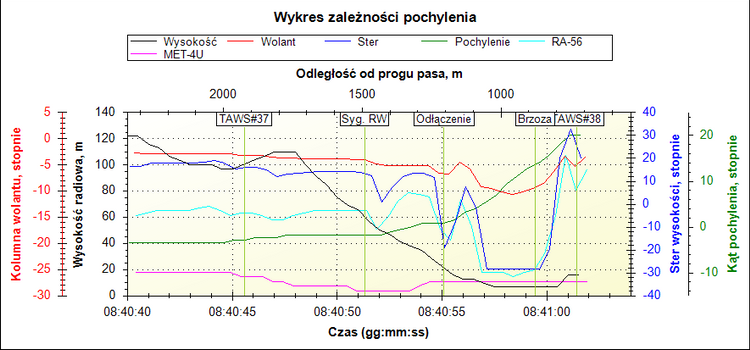
Rysunek 3. Praca systemu sterowania pochyleniem samolotu
Rysunek 4 pokazuje jak na zmiany pochylenia reagował automat ciągu. Każdy wzrost kąta pochylenia w kierunku „dziobem do góry” powoduje wzrost kąta natarcia, a to z kolei wzrost oporu powietrza. W związku z tym automat ciągu, który jest odpowiedzialny za utrzymanie niezmiennej prędkości IAS musi zwiększać prędkość obrotu silników. Synchronizm zmian obu parametrów jest tu w pełni widoczny. Towarzyszące temu zmiany położenia manetek gazu, to efekt wtórny: automat ciągu zmieniał ustawienie mechanizmu wykonawczego ИМАТ-2-12-4В, a ten obok zwiększania przepływu paliwa do silników, poprzez cięgna przekazywał te zmiany do manetek pilotów.
System rejestracyjny MSRP-64 dokonuje odczytu każdego z parametrów tylko dwa razy na sekundę, przełączając się do kolejnego parametru co 1/128 sekundy. To spowodowało ograniczenie rozdzielczości z jaką możliwe było sporządzenie wszystkich dostępnych wykresów i przedstawionego harmonogramu. Z tego powodu nie należy się doszukiwać niezgodności w kolejności zdarzeń, jeśli ta niezgodność jest mniejsza niż 0.5 sekundy – problem może wynikać z ustalonej kolejności wykonywania pomiarów.
Jak widać, poczynając od momentu 08:40:51 wykonana została sekwencja akcji wielu mechanizmów, dowodząca ich pełnej sprawności. Dotyczy to: urządzeń w kabinie pilotów wraz z czujnikami pomiarowymi, ABSU w tym automatu ciągu, serwomechanizmów, cięgien, układów hydraulicznych i samych sterów wysokości, silników i ich sterowania, żyroskopów i ich czujników itd. Gdyby wystąpiły przy tym jakiekolwiek nieprawności wymienionych tu urządzeń samolotowych, przebiegi rejestrowanych parametrów lotu musiałby wyglądać inaczej niż przedstawiono to w raportach MAK i KBWLLP. Ostatecznym kryterium jest przebieg zmian pochylenia samolotu i w konsekwencji przyspieszania pracy silników – kształt tych przebiegów świadczy, że żadnej usterki technicznej nie było.
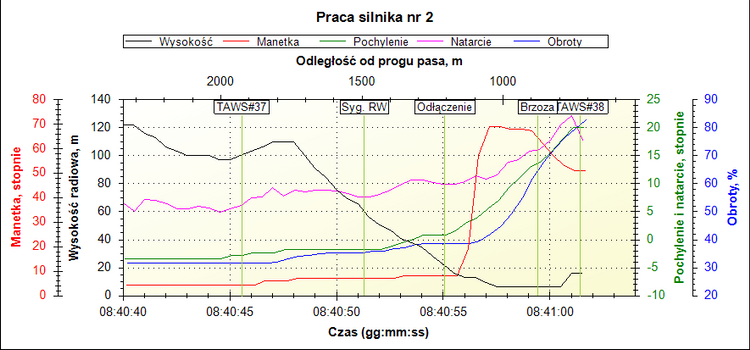
Rysunek 4. Sterowanie pracą silników w samolocie
Na rysunku 3 można zwrócić uwagę na moment z godziny 08:41:01, gdy samolot był w odległości około 760 metrów od progu pasa. Jest to moment, gdy została zerwana linia energetyczna. Niezależnie od tego, czy linię tę zerwał bezpośrednio sam samolot, czy też przelatujące urwane gałęzie, nastąpiło wyładowanie elektryczne, które zaindukowało impuls zakłócający pracę systemów rejestracyjnych i prawdopodobnie całego zasilania samolotu. Skutkiem tego były przypadkowe skoki wartości rejestrowanych parametrów. Z tego względu obcięto przedstawione wykresy zaraz po tym momencie, nie mając pewności, czy zapisane przez rejestratory i pokazywane na wykresach w raportach MAK i KBWLLP wartości są wiarygodne.
Bibliografia:
[1] http://www.aviadocs.net/RLE/Tu-154M/CD2_RLYE/ABSU/Tu-154M_ABSU_ch1.pdf
[2] http://www.aviadocs.net/RLE/Tu-154M/CD2_RLYE/ABSU/Tu-154M_ABSU_ch2.pdf
[3] http://www.aviadocs.net/RLE/Tu-154M/CD2_RLYE/ABSU/Tu-154M_ABSU_ch3.pdf
[4] http://www.aviadocs.net/RLE/Tu-154M/CD1_RTYE/RTE/Papka_15/Tu-154M_RTE_r022.pdf
[5] http://airspot.ru/book/file/1053/TU154_konstrukcija_i_tehniceskoe_obsluzivanie-kniga1.pdf
[6] http://airspot.ru/book/file/1054/TU154_tehniceskoe_obsluzivanie_i_konstrukcija-kniga2.pdf
[7] http://ford.salon24.pl/581811,marek-dabrowski-na-tropie-zagubionej-sprezyny






Komentarze
Pokaż komentarze (131)