Niedawno pierwszy robot otrzymał obywatelstwo Arabii Saudyjskiej… Mnie ten fakt bardzo zaniepokoił. Rozwój sztucznej inteligencji nie jest chyba najlepszym pomysłem na przyszłość ludzkości.
Jako pilot muszę uderzyć się w piersi i wyznać, że moja ukochana dziedzina, jaką jest lotnictwo w ogromny stopniu przyczyniła się do powstania zaawansowanej sztucznej inteligencji. Kiedy to się zaczęło? Kiedy powstały pierwsze systemy mające zastąpić człowieka?
Pomijam automaty tkackie, automaty grające muzykę, to ciekawa dziedzina, ale jak zwykle dopiero wtedy, kiedy wojsko zapragnęło posiadania zaawansowanej automatyki, rozwój taki systemów ruszył jak z kopyta.
Przełomem okazało się skonstruowanie pierwszej torpedy morskiej i pojawienie się samolotu. Rozwój podążał w wielu kierunkach i na wielu płaszczyznach.
Otóż samolot okazał się piekielnie trudnym celem do trafienia przy pomocy naziemnej artylerii przeciwlotniczej. Co z kolei spowodowało intensywny rozwój przeliczników artyleryjskich, zintegrowanych z systemami naprowadzania i prowadzenia ognia.
Po drugie samolot używający uzbrojenia bombowego do niszczenia celów naziemnych, sam potrzebował systemów stabilizacji lotu podczas podejścia do celu, oraz obliczania trajektorii opadania bomb.
Podczas strzelania do przeciwnika w manewrowej walce powietrznej i walce obronnej strzelców pokładowych, pojawiła się potrzeba uwzględnienia dynamiki ruchu celu i strzelającego, powodując rozwój zaawansowanych celowników z rozwiniętym systemem czujników, podających dane wejściowe do układów liczących poprawki podczas strzelania.
Konieczność odciążenia pilotów podczas długich misji spowodowała rozwój tzw. pilotów automatycznych.
Pojawienie się rakiet i bezpilotowych samolotów, spowodowało konieczność całkowicie automatycznego wykonywania sekwencji ataku, od startu do uderzenia w cel.
Zacznijmy od artylerii przeciwlotniczej. Podczas pierwszej wojny światowej prędkość samolotów nie przekraczała zasadniczo 200 km/h. Jednak i to, dla raczkujących systemów przeciwlotniczych była prędkość oszałamiająca. Artylerzysta naprowadzając działo umieszczone na prymitywnych podstawach, musiał kierować je tam gdzie samolot miał znajdować się za chwilę. Przeciętnie lot pocisku do celu trwał ok. 8 - 12 sekund. Na początku wszytko było jedynie sprawą intuicji i wyuczonego zachowanie celowniczego. To było wysoce niewystarczające i szybko pojawiły się tablice z wyliczeniami poprawek kąta podczas strzelania i pierwsze suwaki obliczające parametry strzelania.
Samoloty latały coraz wyżej i szybciej i podczas II wojny światowej przeciętny bombowiec amerykański latał na wysokościach ponad 6000 metrów z prędkościami ok. 380 km/h, w chwilowo dochodzącymi do 450 km/h. Myśliwce osiągały już ponad 600 km/h a nawet 700-720 km/h. Pojawianie się odrzutowych maszyn niemieckich dawało już prędkości 900 km/h.
Przykładowo strzelając do amerykańskich maszyn bombowych lecących na średnich pułapach, niemiecki artylerzysta musiał przewidzieć gdzie znajdzie się bombowiec za 20 do 44 sekund. Kiedy maszyny latały na 10000-11000 metrach, to czas ten był jeszcze większy i dochodził do prawie 1 minuty! Jak kierować artylerią, kiedy mamy do czynienia z takimi trudnościami w określeniu położenia celu? Oczywiście bezpośrednie trafienie pociskiem w samolot było jedynie dziełem przypadku. Strzelano, więc w ten sposób, aby bateria dział składająca się z ustawionych w romb czterech armat, strzelających w tym samym kierunku mogła „obramować” cel pociskami wybuchającymi po osiągnięciu zaprogramowanej wysokości. Pocisk, zatem raził cel zazwyczaj odłamkami, a nie bezpośrednim trafieniem. Ale i to nie było zadaniem prostym.
Dodatkowym kłopotem było to, że wysokość wybuchu regulowana było płonącą ścieżką prochową w zapalniku pocisku, lub mechanizmem zegarowym. Czyli pocisk wybuchał po pewnym czasie i sam nie mierzył wysokości, na której się znajdował. Ponieważ samoloty przemieszczały się ze znaczną prędkością – przykładowo 400 km/h to 111 m/s, co oznacza, że jeśli pocisk leci do celu 22 sekundy, samolot w tym czasie zmienia położenie o 2,44 kilometra – za każdym razem droga pocisku do celu ulegała też zmianie. Zmianie musiało ulegać, zatem ustawienie zegara w pocisku tak, aby wybuchał na odpowiedniej wysokości! To iście tytaniczna praca, aby szybko przeliczać ta parametry i za każdym razem, kiedy do lufy działa wkładany był pocisk, właściwie ustawić zapalnik. A bateria potrafiła oddać nawet 20 strzałów na minutę.
Możliwości człowieka zostały w tym momencie już dawno przekroczone i potrzebne były do tego celu specjalne maszyny. Od lat trzydziestych te maszyny zwiększały swoje możliwości obliczeniowe, choć były tylko tzw. mechanicznymi komputerami. Jedna z nich - przelicznik kierujący ogniem baterii przeciwlotniczej słynnych dział 88 mm - do dziś jest sprawny i służy do demonstracyjnych obliczeń dla studentów słynnej ETH w Zurychu. Maszynę tego typu pokazuję na zdjęciu poniżej:
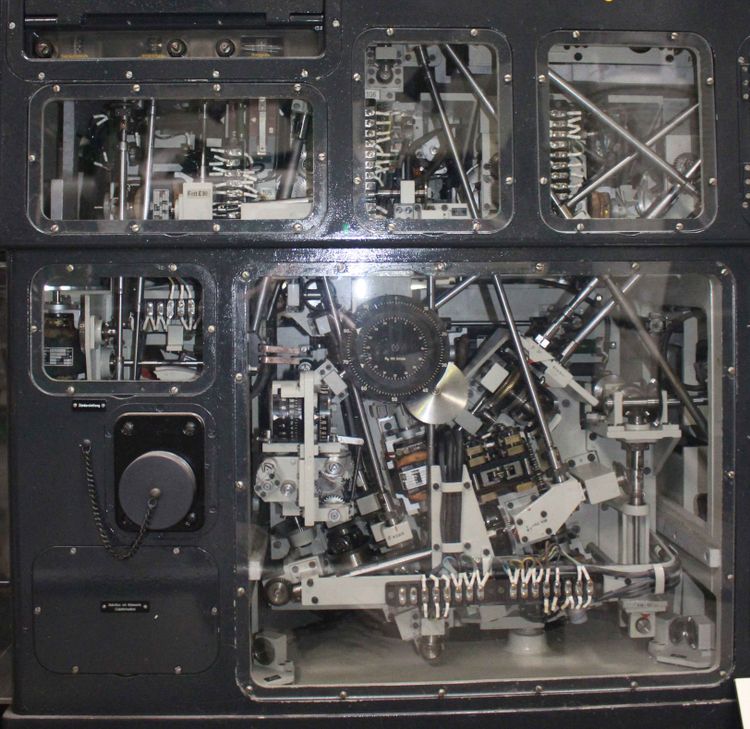
Piękna prawda? Krzywki i zębatki, piekielnie skomplikowany zestaw mechaniczny, zapewniał kierowanie ogniem bezpośrednio z nim sprzężonych armat. Wyliczone wartości początkowo były przesyłane łączami selsynowymi na wskaźniki dla indywidualnej obsługi działa i natychmiast ręcznie ustawiane. Na zdjęciu poniżej widzicie niemieckie działo przeciwlotnicze 128 mm FLAK 40 i jego selsynowe odbiorniki do ustawiania kąta lufy i jej obrotu.
Pierwsze mechaniczne „mózgi” torped były bardzo proste. Ot żyroskop napędzany sprężonym gazem, zawieszony na kardanowym przegubie i mechanicznie połączony ze serwomechanizmem wzmacniającym siły i przenoszącym je na stery torpedy. Był jeszcze ciśnieniomierz, który odpowiadał za głębokość zanurzenia. Żyroskop odpowiadał za orientację przestrzenną torpedy. Utrzymywał kurs torpedy i dzięki temu mógł też sprawnie działać ster głębokości, bo najprościej ujmując, torpeda „wiedziała” gdzie góra, a gdzie dół.
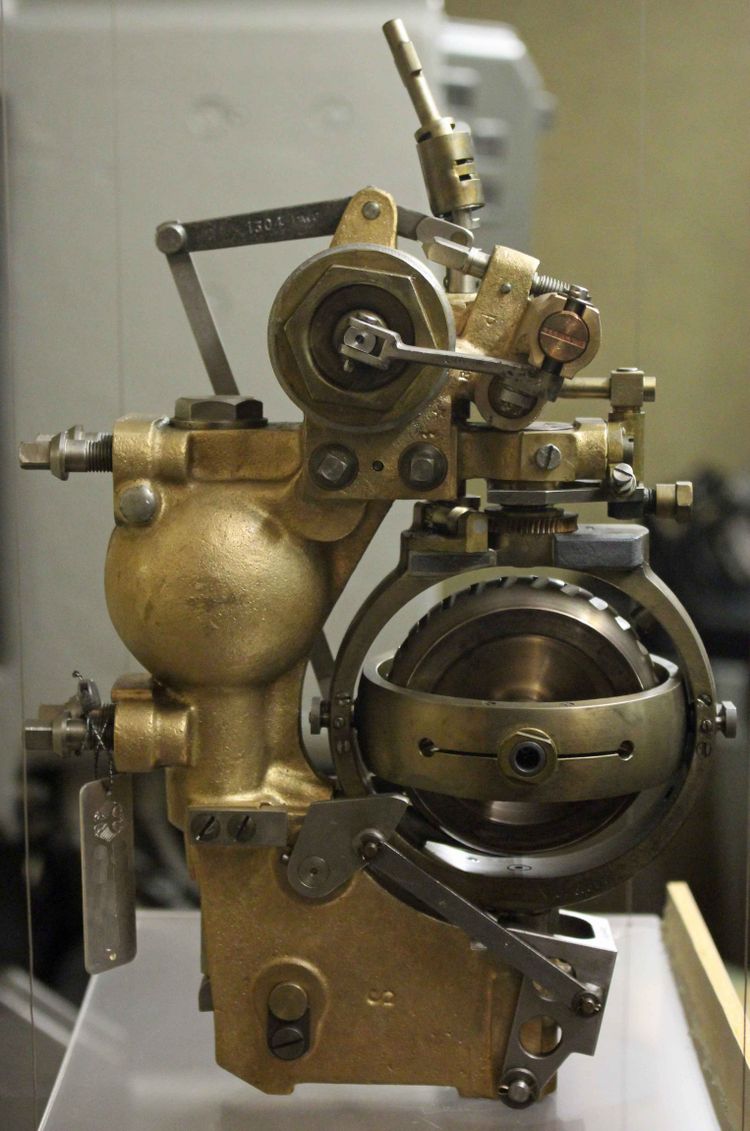
I to jest początek systemów naśladujących świadomość i pozwalających wykonywać coraz bardziej skomplikowane czynności. Te prymitywne żyroskopy, stanowiły milowy krok na drodze do zbudowania inteligentnych całkowicie autonomicznych systemów bojowych.
Kolejny etap, to budowa pilotów automatycznych. Początkową te urządzenia odpowiadały jedynie za lot po prostej. Zauważono bowiem, że automat sprzężony z żyroskopem, dużo stabilniej niż człowiek utrzymuje kurs samolotu. Było to też ważne podczas podejścia bombowców nad cel. Pilot włączał wtedy automatyczne prowadzenie kursu zajmując się jedynie utrzymywaniem prędkości i wysokości lotu. Kurs utrzymywał automat, którym mógł zarządzać bombardier dokonując jego korekt. Dzięki temu, że bombardier nie musiał wydawać poleceń pilotowi, a jedynie sam przy pomocy potencjometru wprowadzał ewentualne poprawki, wzrosła precyzja bombardowań. Coraz więcej funkcji powierzano coraz bardziej skomplikowanym automatom i pod koniec wojny podczas bombardowania pilot nie trzymał w ogóle sterów, a władzę nad samolotem miał celownik bombowy obsługiwany prze bombardiera, którego zadanie polegało wyłącznie na utrzymaniu celu w wizjerze. Reszta czynności wykonywana była przez niesłychanie skomplikowane stopnie mechanicznych przeliczników, sprzężonych z automatycznym pilotem.

Doszło do tego, że słynna B29 „Superfortress” (Na zdjęciu powyżej ze zbiorów NASA) była już właściwie wielkim „latającym komputerem”. Oczywiście analogowym, choć w układach obliczeniowych zastosowano już lampy elektronowe i bramki logiczne. W B29 celownik bombowy sprzężono z automatycznym pilotem, a obronnymi stanowiskami ogniowymi zarządzały przeliczniki uwzględniające ruch własny samolotu i ruch celu. Strzelec kierujący zdalnie ogniem z kopułek obserwacyjnych musiał jedynie utrzymać cel w wizjerze. Kąty ustawienia luf wyliczał za niego komputer. Podobnie było z celownikami bombowymi. Co warto zauważyć w układach sterowania działały pierwsze analogowe bramki logiczne.
Jednak i to nie wystarczało do precyzyjnego trafienia w cel, bo nawet doskonale obliczony punkt zrzutu bomby nie gwarantował, że bomba doleci do celu. Było to spowodowane wieloma czynnikami, w pierwszej kolejności wiatrem, który zawsze wraz z wysokością nad powierzchnią ziemi zmienia kierunek – zazwyczaj różnica wiatru przyziemnego i tego na wysokości 1000 metrów wynosi około 30°! Kolejne czynniki takie jak ciśnienie, wilgotność powietrza, mające wpływ na zjawiska aerodynamiczne oddziałujące na spadającą bombę ograniczały precyzję trafienia.
Już dużo wcześniej postanowiono, zastosować bomby kierowane i samonaprowadzające się na cel. Tu przełomu dokonali Niemcy, budując kierowane bomby beznapędowe takie jak Fritz X i uskrzydlone napędzane silnikiem rakietowym bomby serii Henschel Hs 293 (to tylko najbardziej znane, bo i innych typów było sporo).
I tu pojawił się już poważny problem otóż, aby taką bombą skutecznie sterować i trafić w cel, musiała mieć ona już spory zakres autonomii. Co to znaczy? Otóż musiała wiedzieć, w jakim położeniu się znajduje i utrzymywać sama kurs, kiedy naprowadzający go nie korygował.
Aby to było możliwe, bomba musiała przed odłączeniem się od samolotu nosiciela, uzgadniać z nim swoje położenie przestrzenne. Realizowano to elektrycznym sprzężeniem „mózgu” bomby z żyroskopami układu zdalnego sterowania znajdującymi się na samolocie. Po naciśnięciu przycisku zrzutu, żyroskopy bomby „pamiętały” gdzie jest linia horyzontu, mimo że złącza elektryczne ulegały zerwaniu. Bomba stale samodzielnie utrzymywała kurs, a operator znajdujący się w samolocie musiał utrzymywać cel w wizjerze celownika i dokonywać drobny korekt w naprowadzaniu. Praktyczne prawdopodobieństwo trafienia celu o wymiarach 5x5 metrów wynosiło 50%. W zastosowaniu przeciw dużym celom, skuteczność bomb Fritz X była większa niż 60%, zanim alianci nauczyli się zakłócać radiowe sygnały sterujące bombą.
Na zdjęciu poniżej Widzicie skomplikowany układ usterzenia bomby "Fritz".

Jeszcze ciekawszą bombą był Henschel Hs 293. Jak widzicie na zdjęciu przypominała mały samolot.

Skrzydła umożliwiały już zrzut bomby w dużej odległości od niszczonego celu, tak, że bombowiec znajdował się w strefie wolnej od ostrzału przeciwlotniczego lub względnie bezpiecznej, gdzie ten ostrzał nie był zbyt skuteczny. Bomba miała rakietowy silnik działający po zrzucie i zwiększający jej zasięg. Silnik ten był odrzucany po wypaleniu się paliwa. Podobnie jak Fritz X wyposażona była w system autonomicznie kontrolujący lot, a niektóre jej wersje posiadały kamerę telewizyjną, umożliwiającą bardzo dokładne naprowadzanie. Ostatnie wersje mogły już naprowadzać się same, wykorzystując czujniki podczerwieni. To był milowy krok w rozwoju precyzyjnych broni. Przy pomocy tych bomb zatopiono wiele okrętów i statków o łącznym tonażu przekraczającym 400 000 T.
Poniżej Widzicie usterzenie bomby Henschel Hs 293. Pod bombą odrzucany automatycznie silnik rakietowy Walter.

Jednak największym wyzwaniem było skonstruowanie automatycznych pilotów sterujących rakietami V2 i samolotami bezpilotowymi V1. Zawierały one żyroskopy i układy elektryczne całkowicie automatycznie sterujące lotem.
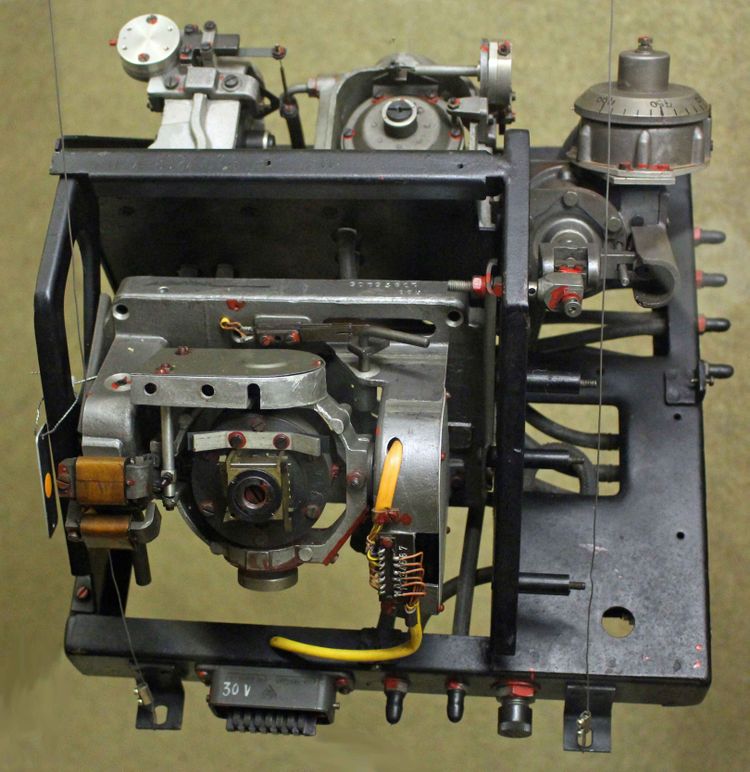
Poniżej widzicie prosty „mózg” latającej bomby Fieseler Fi 103 znanej jako Vergeltungswaffe 1 (broń odwetowa nr 1) – krótko V1. Zdania, które ten autopilot wykonywał były już imponujące. Utrzymywał zadany kurs przez cały czas lotu, czyli ponad 30 minut, porównując go z kursem wskazywanym przez pokładową busolę. Po starcie z katapulty natychmiast korygował momenty przechylające bombę, powstałe w wyniku chwilowych odkształceń powierzchni nośnych spowodowanych ogromny przyśpieszeniem. Poczym automatyczny pilot zwiększał prędkość z 320 km/h do 640 km/h, która była prędkością przelotową V1. Optymalnie sterował torem wznoszenia bomby na zadany pułap przelotowy w zakresie od 300, do 2500 metrów. Podczas lotu uwzględniał kąt znoszenia tak, aby przeciwstawić się bocznym wiatrom. Liczył przebytą drogę i w odpowiednim momencie odcinał dopływ paliwa do silnika odrzutowego (pulsacyjny) przechodząc w strome nurkowanie. Reszty dokonywał zapalnik kontaktowy głowicy wybuchowej. W razie próby wywrócenia bomby do góry brzuchem – co było na początku skuteczną taktyką walki z V1 stosowaną przez myśliwców, podważających końcówką skrzydła własnego samolotu skrzydło bomby – po przekroczeniu przechylenia 15° przełączał się na kanał dodatkowych żyroskopów stabilizujących lot. Źródłem energii napędzającej automatycznego pilota było sprężone powietrze o ciśnieniu 6 Barów, rozpędzające żyroskopy do prędkości 20000 obrotów na minutę. Dokładność pozwalała na trafienie w większe miasto z odległości max. 320 km.
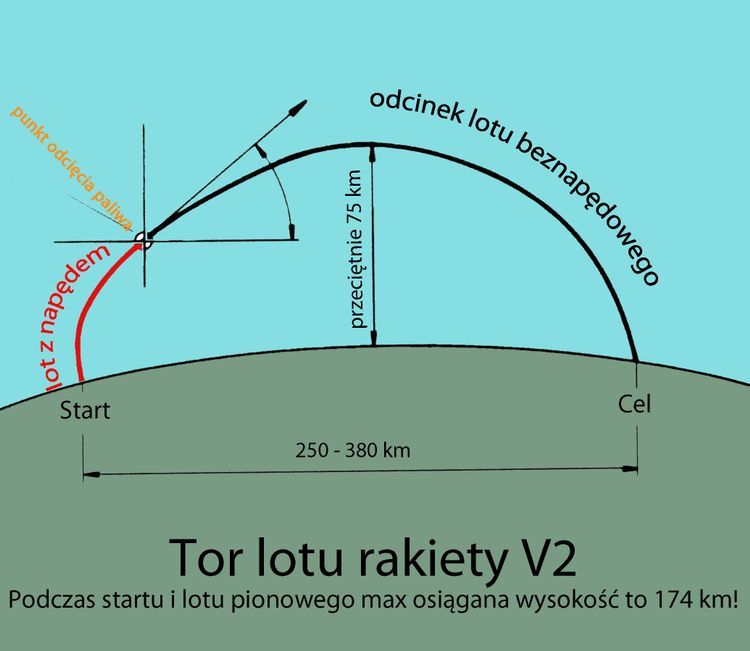
Jeszcze bardziej skomplikowane funkcje musiał wykonywać pilot automatyczny rakiety A 4, czyli słynnej V2.
Aby uzmysłowić Wam poziom komplikacji w sterowaniu rakietą tego typu, wystarczy powiedzieć, że osiągała ona prędkość 1500 m/s (5400 km/h) w ciągu pierwszych 58 sekund lotu. Pionowy start był czynnością niezwykle skomplikowaną dla automatyki rakiety. Do osiągnięcia prędkości ok. 300 km na godzinę , na rakietę nie działały siły aerodynamiczne wystarczające do sterowania jej lotem. Jedynym sposobem było sterowanie strumieniem gazów wylotowych. Przypominało to balansowanie akrobaty stojącego jedną nogą na metalowej pionowej żerdzi, z tą tylko różnicą, że rakieta „stała” na słupie gazów wylotowych jej silnika. Ponieważ rakieta startowała pionowo, po 3 sekundach pionowego lotu pilot automatyczny rakiety zmieniał tor lotu na balistyczny pod kątem 40° - 45°. Faza lotu silnikowego podczas, którego rakieta przyśpieszała, trwała maksymalnie 60 sekund, i była to faza sterowana. Była decydująca dla celności rakiety. Potem rakieta leciała jak pocisk wystrzelony z działa lotem balistycznym niesterowanym. Faza niesterowana zaczynała się najczęściej na wysokości 28 kilometrów. Czyli to czy rakieta trafi w cel zależało od pierwszych 58 sekund lotu i w tym czasie pilot automatyczny musiał sterować rakietą z dokładnością do ułamków sekundy, prowadząc ją na zadany tor lotu. V2 miała minimalny zasięg 250 km, a maksymalny ok. 380 km (ostatnie wersje, zazwyczaj nie przekraczano programowania na odległości większe niż 300 km). Zaprogramowanie zasięgu i kierunku lotu było jedynym sposobem na trafienie w cel. Z tego powodu postanowiono, że parametrem stałym będzie początkowa prędkość lotu niesterowanego 1500 m/s, do której pilot automatyczny musiał rozpędzić rakietę. Po jej osiągnięciu, silnik był wyłączany, mimo że w zbiornikach pozostawała odrobina paliwa. Zapobiegało to niestabilności spalania w końcowej fazie lotu silnikowego, co uniemożliwiłoby celny strzał. Co ciekawe, na tej wysokości znacznie zmniejszały się siły aerodynamiczne i rakieta nie leciała już idealnie statecznie, lecz jej położenie względem toru lotu wglądało tak, że „zadzierała dziobem” do góry. Ten stan pogłębiał się tak, że kiedy po osiągnięciu max wysokości wchodziła w gęste warstwy atmosfery leciała niemal płasko (bokiem do kierunku lotu) i dopiero na ostatnich 15 kilometrach odzyskiwała stateczność, wymuszoną przez siły aerodynamiczne, ponownie lecąc nosem do przodu.
Konstruując automatycznego pilota przyjęto zasadę, że systemy sterowania mają zapobiegać wszelkim niepożądanym zmianom położenia rakiety względem trzech osi przebiegających przez punkt środka ciężkości V2. W pełni sprawna V2 trafiała w obszar opisany elipsą o wielkiej półosi 4,4 km. Zatem odchylenie o 2,2 km od punktu celowania było na tamte czasy dużym osiągnięciem.
Wszystkie bronie do połowy lat siedemdziesiątych używały jedynie rozwiniętych systemów sterowania opartych na zasadzie wymyślonej przez konstruktorów V2. Ich rdzeniem jest opisany wyżej system bezwładnościowej orientacji w przestrzeni, wymyślony w latach dwudziestych ubiegłego stulecie przez austriackiego wynalazcę Johanna Marię Boykow.

Spojrzenie na mózg amerykańskiej rakiety Pershing 1A (zdjęcie powyżej), nawet laikowi pokazuje podobieństwa konstrukcyjne. Pershing 2 zaś posiadał już zaawansowany system sztucznej inteligencji pozwalający na porównanie radarowego obrazu powierzchni ziemi z wzorcem zapisanym w pamięci. I zauważcie, że właśnie to, że system posiada świadomość własnego położenia, jest kluczem do konstruowania robotów podejmujących już samodzielne decyzje.
Tak, więc zdanie „wiem gdzie jestem” indukuje następne zdanie „wiem jakie jest moje zadanie”, a w przyszłości zapewne pojawi się zdania „wiem kim jestem”.
Dzisiaj systemy podejmują w milisekundzie setki decyzji, opierając się na sensorach przewyższających możliwości ludzkich zmysłów miliony razy, oraz na obrazach niedostępnych ludzkim zmysłom. Analiza informacji, które te sensory dostarczają zajęłaby człowiekowi ogromną ilość czasu. Z tego powodu człowiek coraz bardziej staje się elementem systemu, lub staje się zbytecznym elementem systemu.
Poniżej widzicie tylko fragment sensoryki śmigłowca szturmowego AH64 „Apache”. Imponujące prawda?

Dzisiaj rakiety i platformy bojowe potrafią bezproblemowo manewrować, zbierając w czasie rzeczywistym, dane o aktywności obrony przeciwlotniczej.
W 1974 roku w filmie sf „Dark Star” John Carpenter przedstawił dialog astronauty z bombą, która miała awarię systemu zrzutu i groziło to wybuchem na pokładzie kosmolotu. Zobaczcie ten pasjonujący wykład fenomenologiczny i pomyślcie, że czas podobnych dialogów z robotami militarnymi może nie jest tak odległy jak nam się wydaje. I możemy mieć tylko nadzieję, że skutek będzie inny niż przedstawiony w filmie „Dark Star”…
Zobaczcie sobie ten amerykański film szkoleniowy z okresu II wojny światowej pokazujący w przystępny sposób, o co z tymi wyliczeniami poprawek chodzi. Link do filmu:
Inne tematy w dziale Technologie